Logika Kerja
ESP32 mengirimkan sinyal HIGH dan LOW secara bergantian melalui GPIO 2 yang terhubung ke LED, dengan jeda waktu menggunakan fungsi sleep.
Halaman ini merangkum proyek ESP32 dari file PDF menjadi tampilan HTML yang mudah dibaca, memiliki navigasi, tabel koneksi komponen, dan tombol salin source code untuk setiap file.
Membuat LED berkedip (Blink) dengan mengatur pin GPIO ESP32.
Basic • Halaman 1-2Menggerakkan motor servo ke posisi sudut tertentu menggunakan PWM.
Basic • Halaman 2-4Membaca jarak suatu objek menggunakan sensor ultrasonik HC-SR04.
Basic • Halaman 4-6Membaca suhu dan kelembaban ruangan menggunakan sensor DHT22.
Basic • Halaman 7-8Membuat servo bergerak bolak-balik dari sudut 0° ke 180° dan kembali lagi secara terus-menerus.
Halaman 1-2Servo terbuka otomatis saat objek terdeteksi dalam jarak kurang dari 10 cm.
Halaman 4-6LED menyala saat kondisi gelap dan mati saat kondisi terang.
Halaman 7-8Buzzer berbunyi seperti sirine ketika sensor PIR mendeteksi gerakan.
Halaman 9-10Membaca suhu dan kelembaban dari DHT22 lalu menampilkannya pada LCD I2C 16x2.
Halaman 11-18Basic Proyek 1 • Halaman 1-2
Membuat LED berkedip (Blink) dengan mengatur pin GPIO ESP32.
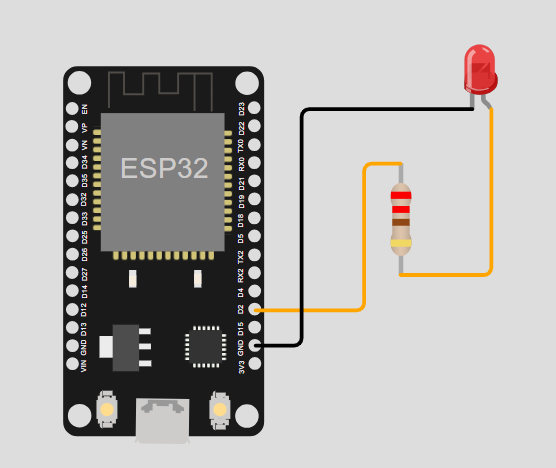
ESP32 mengirimkan sinyal HIGH dan LOW secara bergantian melalui GPIO 2 yang terhubung ke LED, dengan jeda waktu menggunakan fungsi sleep.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| LED | Anode (Panjang) | GPIO 2 (via Resistor 220Ω) |
| LED | Cathode (Pendek) | GND |
from machine import Pin
import time
# LED terhubung ke GPIO 2
led = Pin(2, Pin.OUT)
while True:
led.on()
print("LED ON")
time.sleep(1)
led.off()
print("LED OFF")
time.sleep(1) {
"version": 1,
"author": "MicroPython Learner",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-esp32-devkit-v1",
"id": "esp",
"top": -4.9,
"left": -43.4,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-led",
"id": "led1",
"top": -22.8,
"left": 157.4,
"attrs": { "color": "red" }
},
{
"type": "wokwi-resistor",
"id": "r1",
"top": 72,
"left": 105.05,
"rotate": 90,
"attrs": { "value": "220" }
}
],
"connections": [
[ "esp:TX0", "$serialMonitor:RX", "", [] ],
[ "esp:RX0", "$serialMonitor:TX", "", [] ],
[ "esp:D2", "r1:1", "orange", [ "h57.3", "v-77.5" ] ],
[ "r1:2", "led1:A", "orange", [] ],
[ "led1:C", "esp:GND.1", "black", [ "h-90.2", "v122.1" ] ]
],
"dependencies": {}
} Basic Proyek 2 • Halaman 2-4
Menggerakkan motor servo ke posisi sudut tertentu menggunakan PWM.
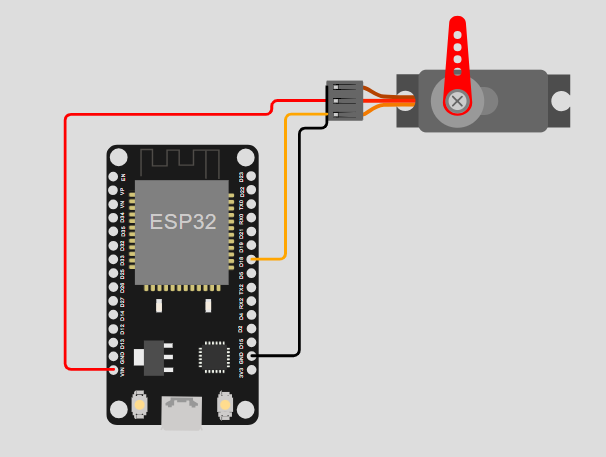
Motor servo diatur ke sudut 0° lalu ke 180° menggunakan fungsi set_angle, yang mengonversi derajat ke lebar pulsa PWM (duty cycle).
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| Servo | V+ (Merah) | VIN (5V) |
| Servo | GND (Coklat/Hitam) | GND |
| Servo | PWM (Orange/Kuning) | GPIO 18 |
from machine import Pin, PWM
from time import sleep
# Servo terhubung ke GPIO 18
servo = PWM(Pin(18), freq=50)
def set_angle(angle):
# Batasi sudut 0 - 180 derajat
angle = max(0, min(180, angle))
# Pulsa servo standar
min_us = 500 # 0 derajat
max_us = 2500 # 180 derajat
pulse_us = min_us + (angle / 180) * (max_us - min_us)
# Konversi ke duty ESP32 MicroPython, skala 0 - 1023
duty = int((pulse_us / 20000) * 1023)
servo.duty(duty)
# Posisi awal
set_angle(0)
sleep(1)
# Putar servo ke 180 derajat
set_angle(180)
sleep(5)
# Kembali ke posisi awal
set_angle(0)
sleep(1)
# Opsional: matikan sinyal PWM setelah selesai
servo.deinit() {
"version": 1,
"author": "MicroPython Learner",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-esp32-devkit-v1",
"id": "esp",
"top": 0,
"left": 0,
"attrs": {
"env": "micropython-20231227-v1.22.0"
}
},
{
"type": "wokwi-servo",
"id": "servo1",
"top": -88.4,
"left": 153.6,
"attrs": {
"hornColor": "Red"
}
}
],
"connections": [
[ "esp:TX0", "$serialMonitor:RX", "", [] ],
[ "esp:RX0", "$serialMonitor:TX", "", [] ],
[ "servo1:V+", "esp:VIN", "red", [ "h-38.4", "v9.7", "h-144", "v177.7" ] ],
[ "servo1:GND", "esp:GND.1", "black", [ "v28.8", "h-19.2", "v158.6" ] ],
[ "servo1:PWM", "esp:D18", "orange", [ "h-28.8", "v101.1" ] ]
],
"dependencies": {}
} Basic Proyek 3 • Halaman 4-6
Membaca jarak suatu objek menggunakan sensor ultrasonik HC-SR04.
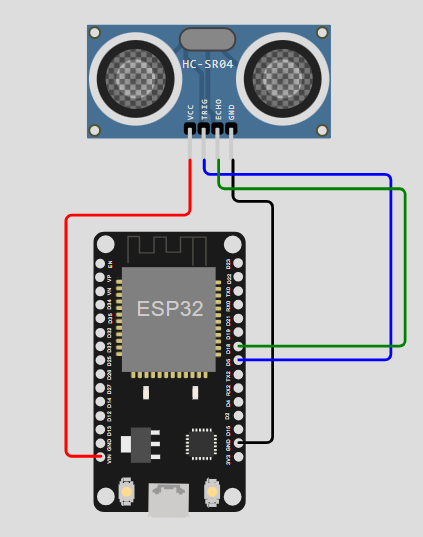
Sensor mengirim pulsa ultrasonik (trigger) dan mengukur waktu pantulan (echo). Waktu tersebut dikonversi menjadi jarak (cm) dan ditampilkan pada console.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| HC-SR04 | VCC | VIN (5V) |
| HC-SR04 | GND | GND |
| HC-SR04 | TRIG | GPIO 5 |
| HC-SR04 | ECHO | GPIO 18 |
"""
=============================================
SENSOR JARAK HC-SR04
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika: Membaca jarak benda menggunakan
sensor ultrasonik HC-SR04.
=============================================
"""
from machine import Pin, time_pulse_us
import time
# --- Konfigurasi Pin ---
trig = Pin(5, Pin.OUT)
echo = Pin(18, Pin.IN)
# --- Konfigurasi ---
TIMEOUT_US = 30000 # Timeout pulsa dalam mikrodetik
JARAK_DETEKSI = 10 # Batas deteksi dalam cm
# --- Fungsi Sensor ---
def get_distance():
"""Mengukur jarak menggunakan sensor ultrasonik dalam cm."""
# Pastikan trigger LOW terlebih dahulu
trig.value(0)
time.sleep_us(2)
# Kirim pulsa trigger selama 10 mikrodetik
trig.value(1)
time.sleep_us(10)
trig.value(0)
# Baca durasi pantulan pada pin echo
duration = time_pulse_us(echo, 1, TIMEOUT_US)
# Jika timeout atau gagal membaca
if duration < 0:
return 0
# Rumus jarak:
# jarak = waktu / 2 / 29.1
# dibagi 2 karena gelombang pergi-pulang
distance = (duration / 2) / 29.1
return distance
# --- Program Utama ---
print("=" * 44)
print(" 📏 SENSOR JARAK HC-SR04")
print("=" * 44)
while True:
jarak = get_distance()
if jarak == 0:
print("Sensor tidak membaca jarak / timeout")
elif jarak < JARAK_DETEKSI:
print(f"Jarak: {jarak:5.1f} cm | [!] Objek TERDETEKSI")
else:
print(f"Jarak: {jarak:5.1f} cm | [ ] Aman")
time.sleep(0.5) {
"version": 1,
"author": "MicroPython Learner",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-esp32-devkit-v1",
"id": "esp",
"top": 0,
"left": 0,
"attrs": {
"env": "micropython-20231227-v1.22.0"
}
},
{
"type": "wokwi-hc-sr04",
"id": "sonic1",
"top": -142.5,
"left": -4.1,
"attrs": {
"distance": "50"
}
}
],
"connections": [
[ "esp:TX0", "$serialMonitor:RX", "", [] ],
[ "esp:RX0", "$serialMonitor:TX", "", [] ],
[ "sonic1:VCC", "esp:VIN", "red", [ "v38.4", "h-86.4", "v153.6" ] ],
[ "sonic1:GND", "esp:GND.1", "black", [ "v28.8", "h27.6", "v153.6" ] ],
[ "sonic1:TRIG", "esp:D5", "blue", [ "v10", "h130", "v120" ] ],
[ "sonic1:ECHO", "esp:D18", "green", [ "v20", "h130", "v165" ] ]
],
"dependencies": {}
} Basic Proyek 4 • Halaman 7-8
Membaca suhu dan kelembaban ruangan menggunakan sensor DHT22.
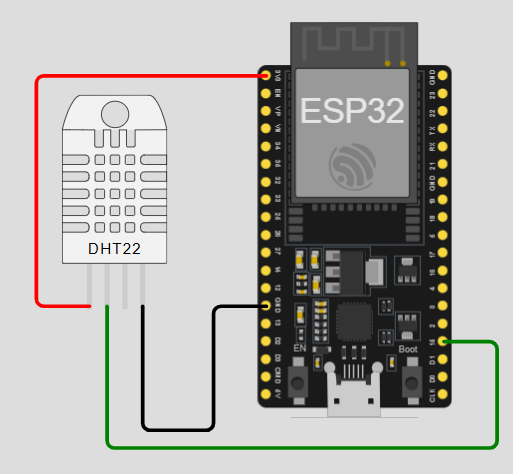
Menggunakan pustaka dht bawaan MicroPython untuk membaca sensor DHT22 pada interval tertentu dan menampilkannya di Serial Monitor.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| DHT22 | VCC | 3V3 |
| DHT22 | GND | GND |
| DHT22 | SDA / Data | GPIO 15 |
"""
=============================================
SENSOR SUHU & KELEMBABAN DHT22
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika:
ESP32 membaca suhu dan kelembaban dari
sensor DHT22, lalu menampilkannya pada
Serial Monitor.
=============================================
"""
from machine import Pin
import dht
import time
# --- Konfigurasi Pin ---
sensor = dht.DHT22(Pin(15))
# --- Konfigurasi ---
INTERVAL = 2 # Interval pembacaan sensor dalam detik
# --- Program Utama ---
print("=" * 44)
print(" 🌡️ SENSOR SUHU & KELEMBABAN DHT22")
print("=" * 44)
while True:
try:
# Membaca data dari sensor DHT22
sensor.measure()
suhu = sensor.temperature()
kelembaban = sensor.humidity()
print(f"Suhu : {suhu:.1f} °C")
print(f"Kelembaban : {kelembaban:.1f} %")
print("-" * 44)
except Exception as e:
print("Gagal membaca sensor DHT22")
print("Error:", e)
print("-" * 44)
time.sleep(INTERVAL) {
"version": 1,
"author": "MicroPython Learner",
"editor": "wokwi",
"parts": [
{
"type": "board-esp32-devkit-c-v4",
"id": "esp",
"top": -57.6,
"left": 129.64,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{ "type": "wokwi-dht22", "id": "dht1", "top": -18.9, "left": 23.4,
"attrs": {} }
],
"connections": [
[ "esp:TX", "$serialMonitor:RX", "", [] ],
[ "esp:RX", "$serialMonitor:TX", "", [] ],
[ "dht1:VCC", "esp:3V3", "red", [ "h-28.8", "v-124.8" ] ],
[ "dht1:GND", "esp:GND.1", "black", [ "v67.2", "h38.4", "v-67.2",
"h28.65" ] ],
[ "dht1:SDA", "esp:15", "green", [ "v76.8", "h211.3", "v-57.6" ] ]
],
"dependencies": {}
} Proyek 1 • Halaman 1-2
Membuat servo bergerak bolak-balik dari sudut 0° ke 180° dan kembali lagi secara terus-menerus.
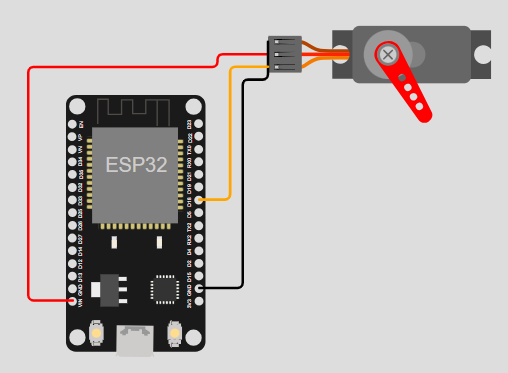
Servo menerima sinyal PWM dari ESP32 pada pin D18. Program mengubah nilai sudut menjadi duty cycle dalam nanodetik.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| Servo Motor | V+ | VIN (5V) |
| Servo Motor | GND | GND |
| Servo Motor | PWM | D18 / GPIO 18 |
| Serial | TX0/RX0 | Serial Monitor |
"""
=============================================
SERVO MOTOR SWEEP
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika: Servo bergerak bolak-balik
dari 0 ke 180 derajat.
=============================================
"""
from machine import Pin, PWM
import time
# --- Konfigurasi Pin ---
servo = PWM(Pin(18), freq=50)
# --- Konfigurasi Servo ---
DUTY_MIN = 500000 # 0 derajat (0.5 ms)
DUTY_MAX = 2400000 # 180 derajat (2.4 ms)
STEP = 10 # Langkah per gerakan (derajat)
DELAY = 0.05 # Jeda antar langkah (detik)
PAUSE = 1 # Jeda di ujung (detik)
# --- Fungsi Servo ---
def set_angle(angle):
"""Mengkonversi sudut (0-180) ke duty cycle (ns)."""
duty_ns = int(DUTY_MIN + (angle / 180) * (DUTY_MAX - DUTY_MIN))
servo.duty_ns(duty_ns)
# --- Program Utama ---
print("=" * 40)
print(" SERVO MOTOR SWEEP 0 - 180 derajat")
print("=" * 40)
while True:
print(">> Gerak 0 -> 180 derajat")
for degree in range(0, 181, STEP):
set_angle(degree)
time.sleep(DELAY)
time.sleep(PAUSE)
print("<< Gerak 180 -> 0 derajat")
for degree in range(180, -1, -STEP):
set_angle(degree)
time.sleep(DELAY)
time.sleep(PAUSE)
{
"version": 1,
"author": "MicroPython Learner",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-esp32-devkit-v1",
"id": "esp",
"top": 0,
"left": 0,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-servo",
"id": "servo1",
"top": -88.4,
"left": 153.6,
"attrs": { "hornColor": "Red" }
}
],
"connections": [
[ "esp:TX0", "$serialMonitor:RX", "", [] ],
[ "esp:RX0", "$serialMonitor:TX", "", [] ],
[ "servo1:V+", "esp:VIN", "red", [ "h-38.4", "v9.7", "h-144", "v177.7" ] ],
[ "servo1:GND", "esp:GND.1", "black", [ "v28.8", "h-19.2", "v158.6" ] ],
[ "servo1:PWM", "esp:D18", "orange", [ "h-28.8", "v101.1" ] ]
],
"dependencies": {}
}Proyek 2 • Halaman 4-6
Servo terbuka otomatis saat objek terdeteksi dalam jarak kurang dari 10 cm.
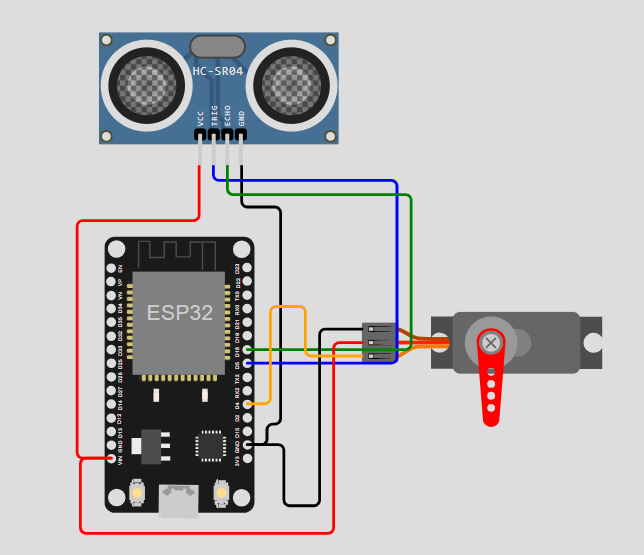
HC-SR04 mengirim pulsa ultrasonik melalui TRIG dan membaca pantulan pada ECHO. Jika jarak di bawah ambang, servo bergerak ke sudut buka.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| HC-SR04 | VCC | VIN (5V) |
| HC-SR04 | GND | GND |
| HC-SR04 | TRIG | D5 / GPIO 5 |
| HC-SR04 | ECHO | D18 / GPIO 18 |
| Servo Motor | V+ | VIN (5V) |
| Servo Motor | GND | GND |
| Servo Motor | PWM | D4 / GPIO 4 |
| Serial | TX0/RX0 | Serial Monitor |
"""
=============================================
SENSOR JARAK HC-SR04 + SERVO MOTOR
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika: Servo terbuka (180) saat objek
terdeteksi dalam jarak < 10 cm.
=============================================
"""
from machine import Pin, PWM, time_pulse_us
import time
# --- Konfigurasi Pin ---
trig = Pin(5, Pin.OUT)
echo = Pin(18, Pin.IN)
servo = PWM(Pin(4), freq=50)
# --- Konfigurasi ---
JARAK_DETEKSI = 10 # Jarak trigger (cm)
TIMEOUT_US = 30000 # Timeout pulsa (us) ~ 4-5m
DUTY_MIN = 500000 # 0 derajat (0.5 ms)
DUTY_MAX = 2400000 # 180 derajat (2.4 ms)
SUDUT_BUKA = 180 # Sudut servo saat terbuka
SUDUT_TUTUP = 0 # Sudut servo saat tertutup
# --- Fungsi Sensor ---
def get_distance():
"""Mengukur jarak menggunakan sensor ultrasonik (cm)."""
trig.value(0)
time.sleep_us(2)
trig.value(1)
time.sleep_us(10)
trig.value(0)
duration = time_pulse_us(echo, 1, TIMEOUT_US)
if duration < 0:
return 0
return (duration / 2) / 29.1
# --- Fungsi Servo ---
def set_servo(angle):
"""Menggerakkan servo ke sudut tertentu (0-180)."""
duty_ns = int(DUTY_MIN + (angle / 180) * (DUTY_MAX - DUTY_MIN))
servo.duty_ns(duty_ns)
# --- Program Utama ---
print("=" * 44)
print(" 📏 SENSOR JARAK + SERVO OTOMATIS")
print(f" Trigger jarak < {JARAK_DETEKSI} cm")
print("=" * 44)
while True:
jarak = get_distance()
if jarak > 0 and jarak < JARAK_DETEKSI:
print(f"Jarak: {jarak:5.1f} cm | [!] TERDETEKSI -> Servo BUKA")
set_servo(SUDUT_BUKA)
else:
print(f"Jarak: {jarak:5.1f} cm | [ ] Aman -> Servo TUTUP")
set_servo(SUDUT_TUTUP)
time.sleep(0.1)
{
"version": 1,
"author": "MicroPython Learner",
"editor": "wokwi",
"parts": [
{
"type": "wokwi-esp32-devkit-v1",
"id": "esp",
"top": 0,
"left": 0,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-hc-sr04",
"id": "sonic1",
"top": -142.5,
"left": -4.1,
"attrs": { "distance": "2" }
},
{
"type": "wokwi-servo",
"id": "servo1",
"top": 17.2,
"left": 182.4,
"attrs": { "hornColor": "Red" }
}
],
"connections": [
[ "esp:TX0", "$serialMonitor:RX", "", [] ],
[ "esp:RX0", "$serialMonitor:TX", "", [] ],
[ "sonic1:VCC", "esp:VIN", "red", [ "v38.4", "h-86.4", "v153.6", "v14.5" ] ],
[ "sonic1:GND", "esp:GND.1", "black", [ "v28.8", "h27.6", "v153.6", "h-9.6", "v14.6" ] ],
[ "sonic1:TRIG", "esp:D5", "blue", [ "v10", "h130", "v120" ] ],
[ "sonic1:ECHO", "esp:D18", "green", [ "v20", "h130", "v165" ] ],
[ "servo1:V+", "esp:VIN", "red", [ "h-20", "v135", "h-179.2", "v-56" ] ],
[ "servo1:GND", "esp:GND.1", "black", [ "h-30", "v125", "h-25.2", "v-46" ] ],
[ "servo1:PWM", "esp:D4", "orange", [ "h-40", "v-35", "h-24.8", "v66" ] ]
],
"dependencies": {}
}Proyek 3 • Halaman 7-8
LED menyala saat kondisi gelap dan mati saat kondisi terang.
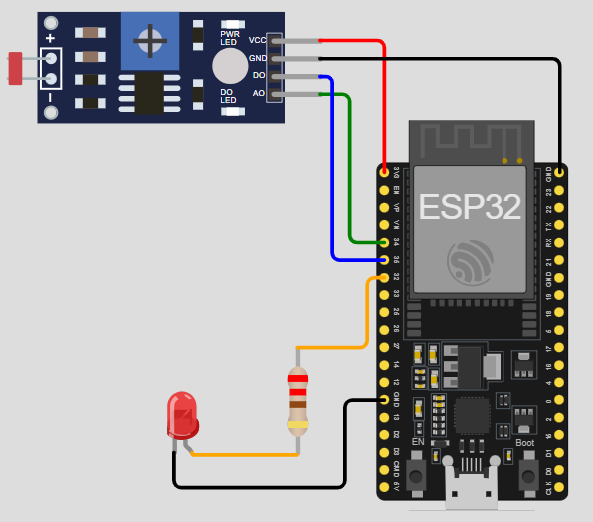
ESP32 membaca nilai analog LDR pada pin GPIO 34. Jika nilai ADC lebih rendah dari threshold, LED pada GPIO 32 dinyalakan.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| LDR Sensor | VCC | 3V3 |
| LDR Sensor | GND | GND |
| LDR Sensor | AO | GPIO 34 / Analog Input |
| LDR Sensor | DO | GPIO 35 / Digital Input |
| Resistor 220Ω | Pin 1 | GPIO 32 |
| Resistor 220Ω | Pin 2 | LED Anode (A) |
| LED Merah | Cathode (C) | GND |
"""
=============================================
SENSOR CAHAYA (LDR) - LED Otomatis
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika: LED menyala saat gelap,
LED mati saat terang.
=============================================
"""
from machine import Pin, ADC
import time
# --- Konfigurasi Pin ---
ldr_analog = ADC(Pin(34))
ldr_analog.atten(ADC.ATTN_11DB) # Range 0 - 3.3V
ldr_analog.width(ADC.WIDTH_12BIT) # Resolusi 0 - 4095
ldr_digital = Pin(35, Pin.IN)
led = Pin(32, Pin.OUT)
# --- Threshold ---
# Pada Wokwi: nilai ADC rendah = gelap, tinggi = terang
THRESHOLD_GELAP = 1000
# --- Program Utama ---
print("=" * 44)
print(" 💡 SENSOR CAHAYA - Lampu Otomatis")
print("=" * 44)
while True:
nilai = ldr_analog.read()
persen = round((nilai / 4095) * 100, 1)
if nilai < THRESHOLD_GELAP:
led.on()
status = "🌙 GELAP → LED ON "
else:
led.off()
status = "☀️ TERANG → LED OFF"
print(f"ADC: {nilai:4d} | Cahaya: {persen:5.1f}% | {status}")
time.sleep(0.5)
{
"version": 1,
"author": "Jojo",
"editor": "wokwi",
"parts": [
{
"type": "board-esp32-devkit-c-v4",
"id": "esp",
"top": 9.6,
"left": 52.84,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-photoresistor-sensor",
"id": "ldr1",
"top": -50,
"left": -150,
"attrs": {}
},
{
"type": "wokwi-led",
"id": "led1",
"top": 150,
"left": -73,
"attrs": { "color": "red" }
},
{
"type": "wokwi-resistor",
"id": "r1",
"top": 158.4,
"left": -19.75,
"rotate": 90,
"attrs": { "value": "220" }
}
],
"connections": [
[ "esp:TX", "$serialMonitor:RX", "", [] ],
[ "esp:RX", "$serialMonitor:TX", "", [] ],
[ "ldr1:VCC", "esp:3V3", "red", [ "h0" ] ],
[ "ldr1:GND", "esp:GND.2", "black", [ "h0" ] ],
[ "ldr1:AO", "esp:34", "green", [ "h16.4", "v81.3" ] ],
[ "ldr1:DO", "esp:35", "blue", [ "h6.8", "v100.6" ] ],
[ "r1:1", "esp:32", "orange", [ "h38.4", "v-38.4" ] ],
[ "r1:2", "led1:A", "orange", [ "h0" ] ],
[ "led1:C", "esp:GND.1", "black", [ "v19.2", "h93.8", "v-48" ] ]
],
"dependencies": {}
}Proyek 4 • Halaman 9-10
Buzzer berbunyi seperti sirine ketika sensor PIR mendeteksi gerakan.
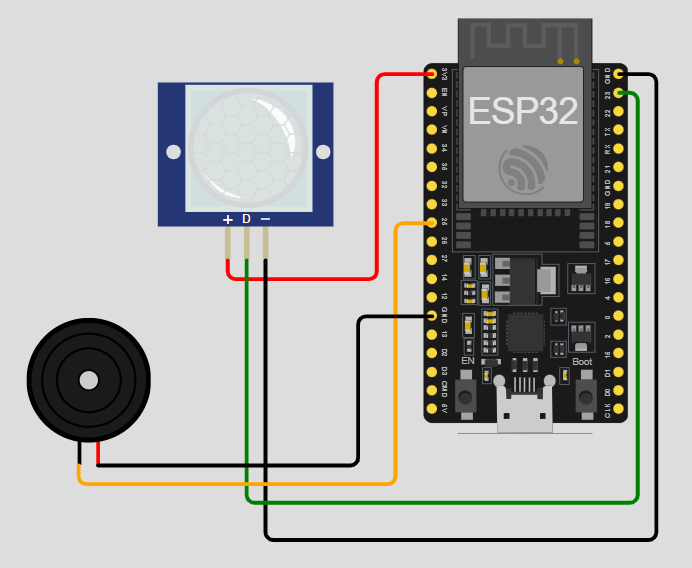
PIR memberikan sinyal HIGH ketika mendeteksi gerakan. ESP32 menyalakan buzzer dengan variasi frekuensi agar terdengar seperti alarm.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| PIR Sensor | VCC | 3V3 |
| PIR Sensor | GND | GND |
| PIR Sensor | OUT | GPIO 23 |
| Buzzer | Pin 1 | GPIO 25 |
| Buzzer | Pin 2 | GND |
"""
=============================================
SENSOR GERAK PIR + BUZZER ALARM
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika: Buzzer berbunyi saat gerakan
terdeteksi oleh sensor PIR.
=============================================
"""
from machine import Pin, PWM
import time
# --- Konfigurasi Pin ---
pir = Pin(23, Pin.IN)
buzzer = PWM(Pin(25), freq=1000, duty=0)
# --- Konfigurasi ---
DURASI_ALARM = 2 # Durasi buzzer berbunyi (detik)
FREKUENSI = 1500 # Frekuensi buzzer (Hz)
COOLDOWN = 3 # Jeda antar deteksi (detik)
# --- Fungsi Alarm ---
def bunyikan_alarm():
"""Bunyi alarm naik-turun seperti sirine."""
for _ in range(4):
buzzer.freq(1500)
buzzer.duty(512)
time.sleep_ms(250)
buzzer.freq(2500)
buzzer.duty(512)
time.sleep_ms(250)
buzzer.duty(0)
# --- Program Utama ---
print("=" * 44)
print(" 🚨 SENSOR GERAK PIR + BUZZER ALARM")
print("=" * 44)
print(" Menunggu gerakan...")
print()
while True:
if pir.value() == 1:
print("[!] GERAKAN TERDETEKSI! -> Alarm aktif")
bunyikan_alarm()
print(" Cooldown", COOLDOWN, "detik...")
time.sleep(COOLDOWN)
else:
print("[ ] Tidak ada gerakan")
time.sleep(0.5)
{
"version": 1,
"author": "Jojo",
"editor": "wokwi",
"parts": [
{
"type": "board-esp32-devkit-c-v4",
"id": "esp",
"top": -19.2,
"left": 72.04,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-pir-motion-sensor",
"id": "pir1",
"top": 13.6,
"left": -64.98,
"attrs": {}
},
{
"type": "wokwi-buzzer",
"id": "bz1",
"top": 127.2,
"left": -132.6,
"attrs": { "volume": "0.1" }
}
],
"connections": [
[ "esp:TX", "$serialMonitor:RX", "", [] ],
[ "esp:RX", "$serialMonitor:TX", "", [] ],
[ "pir1:VCC", "esp:3V3", "red", [ "v9.6", "h76.8", "v-105.6" ] ],
[ "pir1:GND", "esp:GND.2", "black", [ "v144", "h201.34", "v-240" ] ],
[ "pir1:OUT", "esp:23", "green", [ "v124.8", "h201.46", "v-211.2" ] ],
[ "bz1:1", "esp:25", "orange", [ "v9.6", "h163.2", "v-134.4" ] ],
[ "bz1:2", "esp:GND.1", "black", [ "h134", "v-76.8" ] ]
],
"dependencies": {}
}Proyek 5 • Halaman 11-18
Membaca suhu dan kelembaban dari DHT22 lalu menampilkannya pada LCD I2C 16x2.
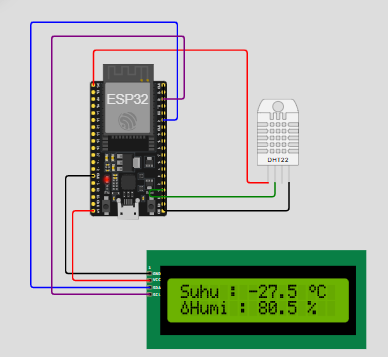
DHT22 dibaca pada GPIO 15. LCD I2C menggunakan SDA GPIO 21 dan SCL GPIO 22 untuk menampilkan suhu serta kelembaban.
| Komponen | Pin | ESP32 Pin |
|---|---|---|
| DHT22 | VCC | 3V3 |
| DHT22 | GND | GND |
| DHT22 | SDA / Data | GPIO 15 |
| LCD I2C 16x2 | VCC | 5V |
| LCD I2C 16x2 | GND | GND |
| LCD I2C 16x2 | SDA | GPIO 21 |
| LCD I2C 16x2 | SCL | GPIO 22 |
"""
=============================================
SENSOR SUHU & KELEMBABAN DHT22
+ LCD I2C 16x2
ESP32 MicroPython | Wokwi Simulator
=============================================
Logika: Membaca suhu dan kelembaban
lalu menampilkan di LCD 16x2.
=============================================
"""
from machine import Pin, SoftI2C
from i2c_lcd import I2cLcd
import dht
import time
# --- Konfigurasi Pin ---
sensor = dht.DHT22(Pin(15))
i2c = SoftI2C(sda=Pin(21), scl=Pin(22), freq=400000)
lcd = I2cLcd(i2c, 0x27, 2, 16)
# --- Konfigurasi ---
INTERVAL = 2 # Interval pembacaan (detik)
# --- Karakter Kustom ---
# Simbol derajat (°)
CHAR_DERAJAT = bytearray([0x06, 0x09, 0x09, 0x06, 0x00, 0x00, 0x00, 0x00])
# Simbol tetesan air
CHAR_TETES = bytearray([0x04, 0x04, 0x0A, 0x0A, 0x11, 0x11, 0x0E, 0x00])
# --- Fungsi LCD ---
def lcd_init():
"""Inisialisasi LCD dengan karakter kustom."""
lcd.clear()
# Simpan karakter kustom di posisi 0 dan 1
lcd.hal_write_command(0x40) # CGRAM address 0
for b in CHAR_DERAJAT:
lcd.hal_write_data(b)
for b in CHAR_TETES:
lcd.hal_write_data(b)
def tampil_lcd(suhu, kelembaban):
"""Menampilkan data ke LCD 16x2."""
lcd.move_to(0, 0)
lcd.putstr("Suhu : {:.1f} ".format(suhu))
lcd.putchar(chr(0)) # Simbol derajat
lcd.putstr("C ")
lcd.move_to(0, 1)
lcd.putchar(chr(1)) # Simbol tetes
lcd.putstr("Humi : {:.1f} % ".format(kelembaban))
# --- Program Utama ---
print("=" * 44)
print(" 🌡️ MONITOR SUHU & KELEMBABAN DHT22")
print("=" * 44)
lcd_init()
lcd.backlight_on()
# Tampil splash screen
lcd.move_to(0, 0)
lcd.putstr(" DHT22 Monitor ")
lcd.move_to(0, 1)
lcd.putstr(" Loading... ")
time.sleep(2)
lcd.clear()
while True:
try:
sensor.measure()
suhu = sensor.temperature()
humi = sensor.humidity()
# Tampil di LCD
tampil_lcd(suhu, humi)
# Tampil di Serial Monitor
print(f"Suhu: {suhu:.1f} C | Kelembaban: {humi:.1f} %")
except Exception as e:
print(f"Error baca sensor: {e}")
lcd.move_to(0, 0)
lcd.putstr("Sensor Error! ")
lcd.move_to(0, 1)
lcd.putstr("Cek koneksi... ")
time.sleep(INTERVAL)
{
"version": 1,
"author": "Jojo",
"editor": "wokwi",
"parts": [
{
"type": "board-esp32-devkit-c-v4",
"id": "esp",
"top": 0,
"left": 33.64,
"attrs": { "env": "micropython-20231227-v1.22.0" }
},
{
"type": "wokwi-dht22",
"id": "dht1",
"top": 48.3,
"left": 263.4,
"attrs": {}
},
{
"type": "wokwi-lcd1602",
"id": "lcd1",
"top": 256,
"left": 111.2,
"attrs": { "pins": "i2c" }
}
],
"connections": [
[ "esp:TX", "$serialMonitor:RX", "", [] ],
[ "esp:RX", "$serialMonitor:TX", "", [] ],
[ "dht1:VCC", "esp:3V3", "red", [ "h-28.8", "v-182.4", "h-211.35" ] ],
[ "dht1:GND", "esp:GND.2", "black", [ "v38.4", "h-115.2" ] ],
[ "dht1:SDA", "esp:15", "green", [ "v19.2", "h-172.7", "v57.6" ] ],
[ "lcd1:GND", "esp:GND.1", "black", [ "h-115.2", "v-134.4" ] ],
[ "lcd1:VCC", "esp:5V", "red", [ "h-105.6", "v-95.9" ] ],
[ "lcd1:SDA", "esp:21", "blue", [ "h-163.2", "v-364.6", "h201.6", "v134.4" ] ],
[ "lcd1:SCL", "esp:22", "purple", [ "h-134.4", "v-354.9", "h182.4", "v86.4" ] ]
],
"dependencies": {}
}"""lcd_api.py
LCD API base class for MicroPython.
"""
import time
class LcdApi:
LCD_CLR = 0x01
LCD_HOME = 0x02
LCD_ENTRY_MODE = 0x04
LCD_ENTRY_INC = 0x02
LCD_ON_CTRL = 0x08
LCD_ON_DISPLAY = 0x04
LCD_FUNCTION = 0x20
LCD_FUNCTION_2LINES = 0x08
LCD_BACKLIGHT = 0x08
def __init__(self, num_lines, num_columns):
self.num_lines = num_lines
self.num_columns = num_columns
self.cursor_x = 0
self.cursor_y = 0
self.backlight = True
self.hal_write_init_nibble(self.LCD_FUNCTION | self.LCD_FUNCTION_2LINES)
time.sleep_ms(5)
self.hal_write_init_nibble(self.LCD_FUNCTION | self.LCD_FUNCTION_2LINES)
time.sleep_ms(1)
self.hal_write_init_nibble(self.LCD_FUNCTION | self.LCD_FUNCTION_2LINES)
time.sleep_ms(1)
self.hal_write_command(self.LCD_FUNCTION | self.LCD_FUNCTION_2LINES)
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY)
self.hal_write_command(self.LCD_CLR)
time.sleep_ms(2)
self.hal_write_command(self.LCD_ENTRY_MODE | self.LCD_ENTRY_INC)
def clear(self):
self.hal_write_command(self.LCD_CLR)
self.cursor_x = 0
self.cursor_y = 0
time.sleep_ms(2)
def move_to(self, cursor_x, cursor_y):
self.cursor_x = cursor_x
self.cursor_y = cursor_y
addr = cursor_x & 0x3f
if cursor_y & 1:
addr += 0x40
if cursor_y & 2:
addr += self.num_columns
self.hal_write_command(0x80 | addr)
def putchar(self, char):
self.hal_write_data(ord(char))
self.cursor_x += 1
def putstr(self, string):
for char in string:
self.putchar(char)
def backlight_on(self):
self.backlight = True
self.hal_backlight_on()
def backlight_off(self):
self.backlight = False
self.hal_backlight_off()
def hal_backlight_on(self):
pass
def hal_backlight_off(self):
pass
def hal_write_command(self, cmd):
raise NotImplementedError
def hal_write_data(self, data):
raise NotImplementedError
def hal_write_init_nibble(self, nibble):
raise NotImplementedError
"""i2c_lcd.py
I2C LCD driver for MicroPython.
"""
from lcd_api import LcdApi
from machine import I2C
import time
MASK_RS = 0x01
MASK_RW = 0x02
MASK_E = 0x04
SHIFT_BACKLIGHT = 3
SHIFT_DATA = 4
class I2cLcd(LcdApi):
def __init__(self, i2c, i2c_addr, num_lines, num_columns):
self.i2c = i2c
self.i2c_addr = i2c_addr
self.i2c.writeto(self.i2c_addr, bytearray([0]))
time.sleep_ms(20)
super().__init__(num_lines, num_columns)
def hal_write_init_nibble(self, nibble):
byte = ((nibble >> 4) & 0x0f) << SHIFT_DATA
self.i2c.writeto(self.i2c_addr, bytearray([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytearray([byte]))
def hal_backlight_on(self):
self.i2c.writeto(self.i2c_addr, bytearray([1 << SHIFT_BACKLIGHT]))
def hal_backlight_off(self):
self.i2c.writeto(self.i2c_addr, bytearray([0]))
def hal_write_command(self, cmd):
self._write_byte(cmd, 0)
def hal_write_data(self, data):
self._write_byte(data, MASK_RS)
def _write_byte(self, byte, rs):
bl = (1 << SHIFT_BACKLIGHT) if self.backlight else 0
# High nibble
high = (((byte >> 4) & 0x0f) << SHIFT_DATA) | rs | bl
self.i2c.writeto(self.i2c_addr, bytearray([high | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytearray([high]))
# Low nibble
low = ((byte & 0x0f) << SHIFT_DATA) | rs | bl
self.i2c.writeto(self.i2c_addr, bytearray([low | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytearray([low]))